
www.eautomation.fr
17
'22
Written on Modified on
FAULHABER GROUP
Le servomoteur CC sans balais de la série BX4 de FAULHABER dans l'automatisation des laboratoires
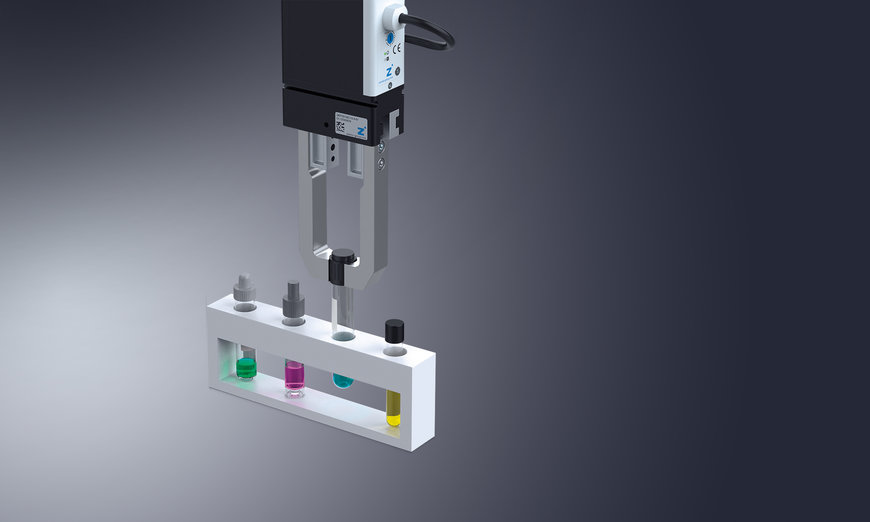
Le tube à essai doit être introduit dans la centrifugeuse, le composant placé à la bonne position, le paquet sur le convoyeur à bande : prendre des objets et les déposer ailleurs fait partie des opérations mécaniques de base dans la plupart des processus de travail. Dans les installation modernes, ce « pick and place » est effectué par des préhenseurs automatisés qui doivent être capables de saisir avec autant de force que de sensibilité, de précision et de fiabilité, et ce, des millions de fois.

De plus en plus, la puissance est fournie par des moteurs électriques tels que le BX4 de FAULHABER. Zimmer Group l'utilise, entre autres, pour sa nouvelle série de pinces GEP2000 qui est notamment beaucoup utilisée dans l'automatisation des laboratoires.
Le test et la vaccination sont reconnus comme étant des mesures efficaces contre le coronavirus. Ils ont permis de sortir du carcan du confinement et contribuent à un retour à la normalité. Cependant, la pandémie a montré les limites du possible, ici aussi. En effet, avec la propagation exponentielle du virus, la demande a explosé, d'abord celle en tests de laboratoire PCR, puis en tests rapides et finalement en vaccins. Au départ, les capacités étaient insuffisantes à chaque étape du processus. L'attente des kits de test et des vaccins semblait interminable pour beaucoup.
L’automatisation de laboratoire contre le Covid-19
Dans la pratique, l'industrie pharmaceutique, les technologies médicales et les laboratoires médicaux ont évolué à un rythme rapide, tant pour l'expansion des capacités de production que pour l'augmentation de celles de test. L'automatisation a été un facteur clé de ce succès. Dans les laboratoires, la pandémie s'est avérée être une incitation majeure à l'automatisation. Les équipements de laboratoire automatisés et les robots universels et flexibles peuvent soulager le personnel d'une grande partie de son travail et contribuer à augmenter le débit et l'efficacité.
La préhension et la manipulation automatisées d'échantillons, de pipettes et de réactifs constituent des étapes centrales et récurrentes du processus. Elles nécessitent des pinces industrielles sensibles pour des petites pièces. Fondamentalement, deux technologies différentes sont disponibles pour la préhension, comme l’explique le Chef de produit Maik Decker, responsable de cette division chez le fabricant Zimmer Group situé dans le sud-ouest de l’Allemagne : « Jusqu'à présent, la majorité des préhenseurs dans l'industrie fonctionnaient de manière pneumatique, c'est-à-dire avec de l'air comprimé. Mais cette technologie n'est pas adaptée aux environnements hygiéniques tels que ceux qui sont requis dans les laboratoires, en médecine et dans les industries pharmaceutiques et de technologies médicales. C'est pourquoi on y utilise des pinces à entraînement électrique. »

Le moteur électrique pour une pince flexible
Outre l'aspect hygiénique, ces pinces présentent un autre avantage : elles ne nécessitent ni système d'air comprimé, ni les conduites qui vont avec. Ces derniers font partie dans certains secteurs industriels de l'équipement standard des installations de production, alors que de l’électricité, il y en a partout. En plus, les machines dans lesquelles les pinces sont installées fonctionnent de toute façon à l'électricité. Le raccordement électrique est beaucoup plus facile à mettre en place qu'une alimentation en air comprimé. Par ailleurs, la commande des composants électriques est à la fois plus facile et plus souple que celle des composants pneumatiques. « Nous constatons une nette tendance à l'utilisation de moteurs électriques, notamment dans l'industrie automobile », ajoute Maik Decker.
Les nouveaux produits de Zimmer Group, comme la nouvelle série GEP2000, suivent et renforcent même cette tendance. Selon la version, la pince pour petites pièces peut saisir et tenir des composants pesant jusqu'à cinq kilogrammes, mais elle est aussi capable de manipuler des pièces filigranes fragiles comme un tube à essai. « L'un des avantages de l'entraînement électrique est que la force de préhension peut être adaptée à tout moment à différents objets, explique Volker Kimmig, chef d'équipe logiciel chez Zimmer Group. Avec la commande appropriée, la pince peut basculer d'une pièce à l'autre pendant le processus en cours. »
10 millions de cycles sans entretien
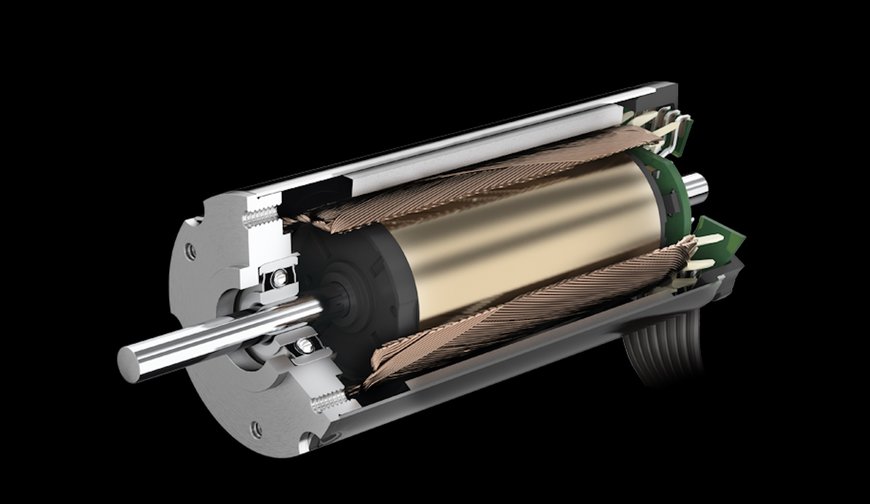
Un servomoteur sans balais de la série BX4 de FAULHABER fournit la puissance pour chacune des étapes de travail. Outre le couple élevé, les points forts de l'entraînement quadripolaire sont les faibles niveaux de vibration et de bruit, la conception compacte et la longue durée de vie. « Nous garantissons pour ce produit une durée de vie de plus de 10 millions de cycles sans maintenance, déclare Volker Kimmig. Bien sûr, cela n'est possible qu'avec un moteur de très grande qualité. » Ce moteur doit également présenter un certain nombre d'autres propriétés afin de résister à un régime continu dans une application typique de pick and place.
À titre d’exemple, l'ingénieur en développement cite la production de clés de voiture : « Les grandes quantités et le débit élevé donnent le ton ici. Les robots préhenseurs travaillent à un rythme très soutenu, sous une contrainte permanente et avec des temps de cycle courts. Le moteur doit démarrer puis s'arrêter à des intervalles très courts. Son accélération est donc cruciale, puisque chaque dixième de seconde compte pour l'ensemble du processus. Il doit aussi être capable de dissiper la chaleur générée lors de ce fonctionnement afin d'éviter toute surchauffe. »
Une collaboration éprouvée
Les experts en préhension de Zimmer Group savaient que le BX4 de FAULHABER répondrait à ces exigences, et pas seulement parce que la fiche technique du produit le disait. Ils avaient déjà installé des moteurs de cette série dans leur famille de pinces GEH6000. Dans le principe, cette pince dite à grande course fonctionne exactement de la même manière que la pince pour petites pièces. En revanche, sa course, c'est-à-dire la distance entre les positions ouverte et fermée des mâchoires de la pince, est beaucoup plus importante, elle peut atteindre 80 millimètres.
« Cela permet au dispositif de couvrir un plus grand nombre d'objets cibles de différentes tailles dans un même processus, explique Maik Decker. Le GEP2000, plus petit, peut en revanche faire son travail dans des espaces très restreints. Bien sûr, cela ne fonctionne qu'avec un moteur qui offre de très hautes performances dans un très petit volume. »
Auto-blocage mécanique
Les séries de pinces ont une caractéristique particulière en commun avec les autres produits de Zimmer Group : la puissance du moteur est transmise aux mâchoires par un entraînement à vis sans fin à pente raide. Même en cas de panne de courant, la force de préhension et la position respective sont maintenues. Une pièce saisie est tenue en toute sécurité par cet auto-blocage mécanique, un dispositif supplémentaire tel qu'un frein n’est pas nécessaire.
Les commandes des deux types de pinces sont conçues de manière quelque peu différente. Dans le cas du GEH6000, les signaux de l'encodeur de l'entraînement sont utilisés pour positionner les mâchoires, alors que pour le GEP2000, cette tâche est effectuée à l'aide d'un capteur de position. Ces deux solutions permettent d'atteindre un très haut degré de reproductibilité : la trajectoire spécifiée des mâchoires est reproduite avec une précision de l’ordre du cinq-centième.
« Dans de nombreuses applications, le prépositionnement est très important lors de la descente de la pince vers l'objet cible, explique Volker Kimmig. Dans des conditions d'exiguïté, la position ouverte peut souvent être à peine plus grande que la position fermée. Des préréglages très précis peuvent également s’avérer nécessaires pour « manœuvrer » un bras de robot dans un environnement complexe. Nous y parvenons d'une part grâce à une électromécanique très précise dans laquelle le moteur joue à nouveau un rôle important, et d'autre part grâce à une connexion flexible des données. Nos pinces peuvent être équipées de IO-Link et d'E/S numériques. Il est ainsi facile d'y entrer et d'en sortir partout. »
www.faulhaber.com
