
www.eautomation.fr
05
'23
Written on Modified on
ONSEMI News
Considérations et solutions pour la conception de robots mobiles autonomes
Les robots mobiles autonomes (autonomous mobile robots, AMR) sont de plus en plus répandus dans de nombreux secteurs, notamment la fabrication, la logistique et l'entreposage, l'agriculture, la vente au détail, l'hôtellerie et bien d'autres encore.
Par : Hunter Freberg, Technical Marketing Engineer, onsemi
Bob Card, Marketing Manager ASG, onsemi
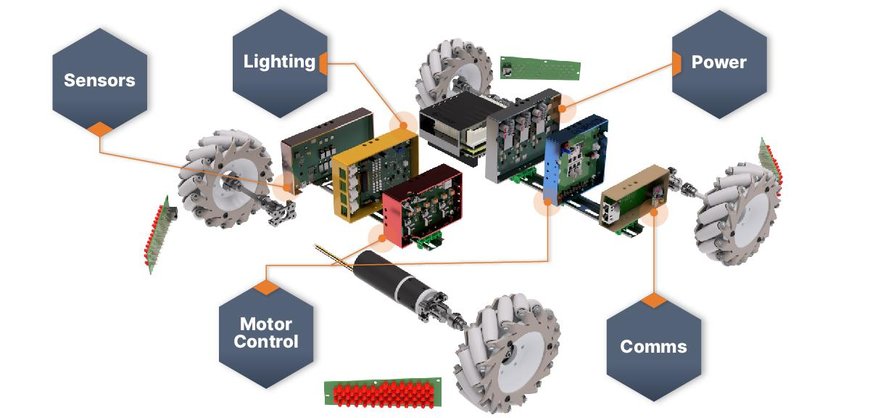
Ils offrent plusieurs avantages, tels qu'une plus grande efficacité, une productivité accrue et des environnements de travail plus sûrs. Cet article traite des applications des AMR et des exigences relatives aux différents composants utilisés dans leur construction, notamment les moteurs et contrôleurs, les capteurs, l'éclairage et les interfaces de communication. Il présente également des solutions adaptées proposées par onsemi pour répondre rapidement à ces multiples exigences.
Applications et avantages des AMR
Dans les usines, les AMR peuvent être utilisés pour transporter des marchandises et pour faciliter la mise en œuvre de procédures de contrôle qualité. Les AMR aident au chargement et au déchargement des marchandises dans le domaine de la logistique et de l'entreposage. Les agriculteurs bénéficient notamment d'un suivi plus précis des cultures et d'une analyse des sols, ce qui entraîne une productivité accrue. Les secteurs de la vente au détail et de l'hôtellerie ont l'avantage de pouvoir offrir un meilleur service à la clientèle en utilisant des AMR pour livrer les commandes et guider les clients dans les lieux, libérant ainsi le personnel pour qu'il puisse interagir avec les clients. Les applications et les secteurs dans lesquels les AMR sont déployés continueront à se développer au fur et à mesure de l'évolution de la technologie sous-jacente.
Les moteurs et leur contrôle dans les AMR
Les actionneurs motorisés sont essentiels dans les AMR, car ils permettent aux bras, aux plates-formes élévatrices et aux roues de se déplacer. Le choix d'un actionneur implique l'évaluation de composants tels que des moteurs à courant continu sans balais (brushless DC, BLDC), des contrôleurs de moteur, des MOSFET, des cartes de contrôleur universelles (universal controller boards, UCB) et des pilotes de grille. Les moteurs BLDC sont très efficaces, génèrent peu de bruit et nécessitent moins d’entretien (ce qui les rend plus fiables). Pour ces raisons, ils sont populaires dans les AMR. Grâce à leur rapport couple/poids élevé, les contrôleurs de moteur peuvent gérer la vitesse et la direction du moteur avec un profil de mouvement précis. Ceux-ci peuvent être entièrement intégrés (avec un algorithme de contrôle incorporé) ou utiliser un microcontrôleur (microcontroller unit, MCU) dédié pour implémenter l'algorithme de contrôle. Les moteurs BLDC triphasés, fréquents dans les AMR, sont commandés par trois transistors de puissance côté haut et trois autres côté bas connectés aux bobines du moteur de manière à pouvoir alimenter ces bobines et créer des champs magnétiques qui font tourner le rotor. Des algorithmes de commutation sont utilisés pour générer des signaux de modulation de largeur d'impulsion (pulse width modulation, PWM) qui sont appliqués à ces commutateurs afin de les activer et de les désactiver. Quelques exemples de schémas de commutation sont le contrôle sinusoïdal, le contrôle trapézoïdal et le contrôle orienté champ. Les commutateurs de commande de moteur présents dans les AMR sont généralement à base de silicium, car les BLDC qui y sont utilisés sont normalement de 48 V ou moins. Pour un développement rapide d'AMR, onsemi propose plusieurs solutions de contrôle de moteur BLDC, notamment le contrôleur de moteur BLDC ECS640A ecoSpin™ de 24 V à 600 V équipé d'un processeur ARM Cortex et intégrant une commande de grille triphasée, des amplificateurs de détection de précision (4x) et des diodes d'amorçage. onsemi propose également le pilote de grille BLDC triphasé NCD83591 de 5 V à 60 V, en tant que solution à faible coût.
onsemi propose aussi un système sur module (SoM) basé sur le SoC Xilinx® Zynq®-7000 pour BLDC. Cet UCB est idéal pour les applications nécessitant un contrôle précis et peut également être utilisé pour mettre en œuvre des fonctions d'intelligence artificielle (IA). Pour les applications de moteur à haute performance dans les AMR, onsemi propose une gamme de MOSFET à moyenne tension (medium voltage, MV). Les derniers MOSFET en silicium T10 d'onsemi sont basés sur la technologie de tranchée à grille blindée avec une résistance à l'enclenchement (RDSon) plus faible, une charge de grille inférieure et une fonctionnalité inhérente de type snubber pour réduire les dépassements et minimiser la résonance. Les MOSFET T10 40 V et 80 V d'onsemi ont un RDSon de 0,42 mΩ et 1,5 mΩ respectivement, les meilleurs de l'industrie. Ils offrent également une charge de grille plus faible et une recouvrement progressif de premier ordre pour réduire les pics de tension. Contactez onsemi pour plus d'informations sur les composants NTMFS0D4N04XM, NTMFWS1D5N08 et le reste de la gamme MV MOSFET.
Capteurs pour AMR
Les AMR doivent surveiller et interagir avec leur environnement, ce qui nécessite différents types de capteurs pour collecter des données pertinentes. Les modèles couramment déployés dans les AMR comprennent des capteurs de température, d'image, LiDAR (pour la cartographie 3D), des capteurs de mouvement de rotation et de communications visuelles par la lumière (visual light communications, VLC). Les capteurs d'image et les processeurs de signaux d'image permettent la perception visuelle, ce qui assure à un AMR de naviguer dans son environnement en détectant et en reconnaissant des objets, puis en adoptant un plan d'action approprié. onsemi propose des capteurs d'images à obturateur global ou à obturateur à déroulement idéaux pour cette application. Par exemple, le capteur d'image AR0234CS est basé sur une conception innovante d'obturateur global de pixels optimisé pour capturer avec précision des scènes en mouvement rapide (120 images par seconde) en pleine résolution, produisant des images nettes pour la vision industrielle ou la lecture de codes-barres. Les capteurs de position mesurent la rotation des roues d’un robot ou d’autres pièces mobiles, ce qui lui permet de suivre sa position et son orientation avec précision. Les capteurs à ultrasons et infrarouges mesurent la distance aux objets éloignés, permettant à un AMR de détecter les obstacles et d'éviter les collisions. Le NCS32100 d'onsemi est un capteur de position rotatif industriel qui allie précision et vitesse. Il dispose d'un capteur de 38 mm et offre une précision de +/-50 arcsec à 6 000 tr/min. Pour les applications de moindre précision, il peut prendre en charge des vitesses allant jusqu'à 100 000 tr/min. Ce nouveau dispositif utilise une approche brevetée de détection de position inductive, idéale pour les applications industrielles et robotiques.
Alimentation d'un AMR
Les technologies d’alimentation électrique et les technologies Power Tree sont des composants critiques qui ont un impact sur la durée de vie de la batterie et les moyens opérationnels d’un AMR. Lors de la sélection du système d'alimentation électrique d’un AMR, les caractéristiques et paramètres de performance importants sont la densité énergétique, les exigences en matière de tension et de courant, l’efficacité et la taille de la solution. La densité énergétique élevée et la longue durée de vie des batteries lithium-ion en font un choix courant dans les AMR. Les unités de gestion de l'énergie régulent le flux d'énergie de la batterie vers les autres composants, tandis que les Power Trees, composés de convertisseurs de commutation et de régulateurs de tension, garantissent qu'ils reçoivent les niveaux de tension et de courant appropriés. À titre d'exemple, le régulateur Buck PWM synchrone FAN65008B atteint un rendement maximal de 98 %, en abaissant une entrée de 48 V à une sortie de 28 V, tout en fournissant une charge constante de 10A DC.
Le contrôleur de facteur de puissance (Power Factor Controller, PFC) NCP1632, le contrôleur LLC NCP1399 et le contrôleur de redresseur synchrone (Synchronous Rectifier Controller, SRC) NCP4307 travaillent ensemble pour un rendement optimal lors de la conversion du courant alternatif en courant continu dans des alimentations jusqu'à 1 kW.
Les MOSFET en carbure de silicium EliteSiC d'onsemi sont idéaux pour la conversion de puissance AC-DC et DC-DC dans les applications de haute puissance typiquement > 3 kW. Pour charger la batterie d'un AMR, une alimentation AC résidentielle ou industrielle doit être convertie en une sortie DC de moyenne tension utilisable. Les FET EliteSiC peuvent être utilisés aussi bien comme frontal AC-DC ou du côté primaire d'un convertisseur DC-DC. Le côté secondaire du convertisseur DC-DC peut faire appel aux MOSFET à tranchée optimisés d'onsemi pour la commutation.
Éclairage
L’importance des technologies d’éclairage, comme les diodes électroluminescentes (light-emitting diodes, LED), réside dans le fait qu’elles permettent aux AMR de naviguer, de communiquer et de fonctionner dans divers environnements. L’éclairage est également utilisé pour la signalisation et pour indiquer l’état ou la direction d’un AMR. Lors du choix d’une technologie d’éclairage pour un AMR, les caractéristiques de performance et les paramètres à prendre en compte sont la luminosité, la température de couleur et la consommation électrique. Les contrôleurs et pilotes de LED sont des composants essentiels qui surveillent la quantité de courant circulant dans les LED, ce qui leur permet d'émettre une lumière d'une intensité et d'une longueur d'onde spécifiques. Les circuits de commande de LED utilisent des MOSFET de puissance côté haut et côté bas pour activer et désactiver le courant des LED et les protéger contre les surtensions et les surintensités. Ils assurent également la stabilité du circuit pilote de LED.
Les pilotes de courant linéaire LED NCV7685 et NCL31000 d'onsemi sont des drivers LED intelligents idéaux pour les applications d'éclairage des AMR. Le NCV7685 dispose de douze sources de courant constant programmables linéaires avec une référence commune, permettant 128 niveaux de cycle de fonctionnement différents réglables par PWM. Le NCL31000 est doté d'un pilote de LED buck à haut rendement qui prend en charge la gradation analogique et PWM à large bande passante (jusqu'à un courant nul), de deux convertisseurs DC-DC auxiliaires et de diagnostics pour surveiller le courant et la tension d'entrée et de sortie, la température des LED et les tensions DC-DC.
Le NCL31000 prend en charge la communication par lumière visible (Visible Light Communication, VLC) qui utilise la lumière visible comme support pour transmettre des données unidirectionnelles jusqu'à 10 Ko/s. VLC permet à un AMR de communiquer en toute sécurité avec d'autres appareils et des êtres humains. Étant donné que le spectre de la lumière visible est compris entre 430 THz et 790 THz, VLC n'influencera pas les technologies sans fil de proximité telles que Bluetooth® Low Energy (Bluetooth LE), Zigbee, UWB et Wi-Fi. VLC est sûr car il est intrinsèquement limité à la visibilité directe. Les applications de navigation dans les entrepôts des AMR bénéficient de l’UWB, du Bluetooth LE (AoA/AoD) et des systèmes de positionnement intérieur (Indoor Positioning Systems, IPS) Wi-Fi. Mais il arrive parfois qu'une congestion ou des interférences RF compromettent l'IPS. Pour pallier ce problème, VLC peut être utilisé pour compléter le RF IPS existant en l'installant dans la grille des plafonniers, chaque plafonnier transmettant un numéro d'identification unique. Si l'AMR contient une base de données des plans d'étage contenant la position de chaque luminaire avec son identifiant unique, l'AMR peut naviguer automatiquement avec une simple photodiode orientée vers le plafond, comme le montre la figure 2 ci-dessous.
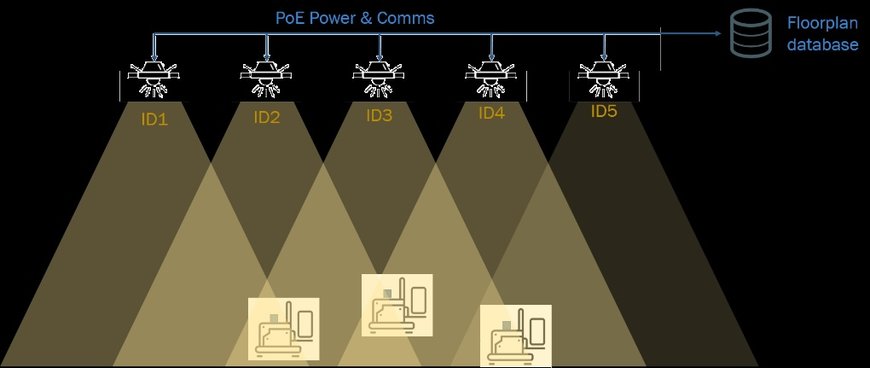
AMR utilisant VLC pour les systèmes de positionnement en intérieur (IPS)
Communication
Les technologies de communication sans fil sont essentielles pour les AMR, car elles leur permettent de communiquer et d'interagir avec d'autres appareils et systèmes en transmettant des données et en recevant des commandes. Lors de la sélection des technologies de communication pour un AMR, les caractéristiques et paramètres de performances à prendre en compte comprennent la plage de fonctionnement, le débit de données, la consommation électrique et la sécurité. La plage de fonctionnement doit communiquer de manière adéquate avec les autres appareils et systèmes de l'environnement en utilisant un débit de données approprié. La consommation d'énergie doit être suffisamment faible pour préserver la durée de vie de la batterie le plus longtemps possible, tandis que la sécurité est essentielle pour protéger les données et les commandes AMR contre tout accès non autorisé ou toute compromission. Bluetooth Low Energy est une technologie de communication sans fil conçue pour une faible consommation d'énergie, ce qui la rend idéale pour les appareils alimentés par batterie. Il prend en charge une gamme de taux de transfert de données pour transmettre les données de capteurs et les signaux de contrôle entre un AMR et d'autres dispositifs.
Bluetooth LE peut également être utilisé dans les systèmes de positionnement en intérieur, permettant aux AMR de naviguer dans des environnements dynamiques. Le RSL15 d'onsemi est un émetteur-récepteur certifié Bluetooth 5.2 pour des applications sans fil Bluetooth LE faciles à mettre en œuvre, qui supporte les fonctionnalités clés AOA (angle d'arrivée) et AOD (angle de départ) pour permettre des systèmes de positionnement intérieur (IPS) précis. Le système radio sur puce (SoC) hautement intégré optimise la taille du système et la durée de vie de la batterie. Il est équipé d'un processeur ARM Cortex-M33 et d'un émetteur-récepteur de 2,4 GHz, qui prend en charge les protocoles personnalisés Bluetooth LE 5.2 et 2,4 GHz.
Les AMR individuels nécessitent également une communication numérique filaire interne pour un contrôle en temps réel entre l'ordinateur central embarqué et les contrôleurs de moteur, les contrôleurs d'éclairage et les capteurs individuels. CAN (2 Mbps) ou CAN-FD (5 Mbps) ont typiquement été les protocoles de choix au fil des années. Les deux protocoles communiquent via un câble UTP (paire torsadée non blindée, unshielded twisted pair), et les nœuds individuels peuvent être configurés en guirlande avec une typologie multipoint, ce qui permet de réduire le poids et le coût du câble. L'Ethernet Alliance a récemment introduit 10BASE-T1S (10 Mbps), un protocole de communication numérique Ethernet basé sur IP également capable de communiquer via une typologie en guirlande multipoint, avec un minimum de 8 nœuds sur un minimum de 25 mètres d'UTP, ou Ethernet à paire unique (Single Pair Ethernet, SPE). Le principal avantage du 10BASE-T1S par rapport au CAN et au CAN-FD réside dans des débits de données plus rapides et un domaine de protocole de communication Ethernet entièrement basé sur IP, du cerveau au nœud périphérique, facilitant l'intelligence artificielle (IA) et l'apprentissage automatique (Machine Learning).
L'émetteur-récepteur Ethernet industriel NCN26010 10BASE-T1S d'onsemi permet une communication Ethernet multipoint pour les applications industrielles utilisant un câblage à paire torsadée existant. Cet appareil est conforme à la norme IEEE 802.3cg et comprend un contrôleur d'accès aux médias (Media Access Controller, MAC), une sous-couche de réconciliation PLCA (Reconciliation Sublayer, RS) et un PHY 10BASE-T1S conçu pour l'Ethernet industriel multipoint. Il fournit toutes les fonctions de couche physique pour transmettre et recevoir des données sur une seule paire torsadée non blindée, et il peut communiquer avec un MCU hôte à l'aide du protocole MACPHY SPI de l'Open Alliance.
Conclusion
Les applications des AMR continuent de se multiplier dans divers secteurs. Cependant, il s’agit de systèmes complexes qui nécessitent l’intégration de plusieurs technologies disparates pour fonctionner de manière autonome, fiable et sûre. Leur succès dépend de la sélection des meilleurs choix technologiques dès la phase de conception.
www.onsemi.com
